Learning Body Shape Variation in Physics-based Characters
Seoul National University
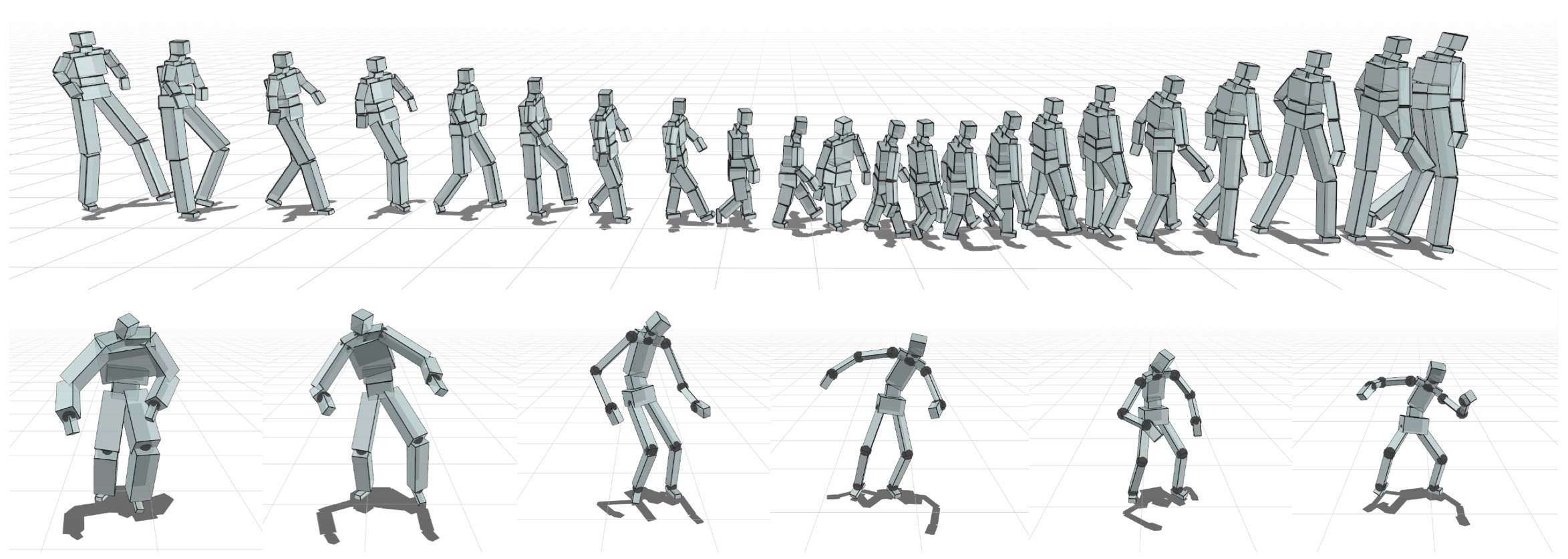
The physically-simulated biped changes its body size and proportions while moving. We trained parametric controllers that can cope with significant variation in height, weight, and body proportions.

Abstract
Recently, deep reinforcement learning (DRL) has attracted great attention in designing controllers for physics-based characters. Despite the recent success of DRL, the learned controller is viable for a single character. Changes in body size and proportions require learning controllers from scratch. In this paper, we present a new method of learning parametric controllers for body shape variation. A single parametric controller enables us to simulate and control various characters having different heights, weights, and body proportions. The users are allowed to create new characters through body shape parameters, and they can control the characters immediately. Our characters can also change their body shapes on the fly during simulation. The key to the success of our approach includes the adaptive sampling of body shapes that tackles the challenges in learning parametric controllers, which relies on the marginal value function that measures control capabilities of body shapes. We demonstrate parametric controllers for various physically simulated characters such as bipeds, quadrupeds, and underwater animals.
Publication
Jungdam Won and Jehee Lee. 2019
Learning Body Shape Variation in Physics-based Characters
ACM Transactions on Graphics, 38, 6, 207 (SIGGRAPH Asia 2019)
Learning Body Shape Variation in Physics-based Characters
ACM Transactions on Graphics, 38, 6, 207 (SIGGRAPH Asia 2019)
Video
Bibtex
@article{Won:2019,
author = {Won, Jungdam and Lee, Jehee},
title = {Learning Body Shape Variation in Physics-based Characters},
journal = {ACM Trans. Graph.},
volume = {38},
number = {6},
year = {2019},
articleno = {207},
}