Blog
SoftCon: Simulation and Control of Soft-Bodied Animals with Biomimetic Actuators
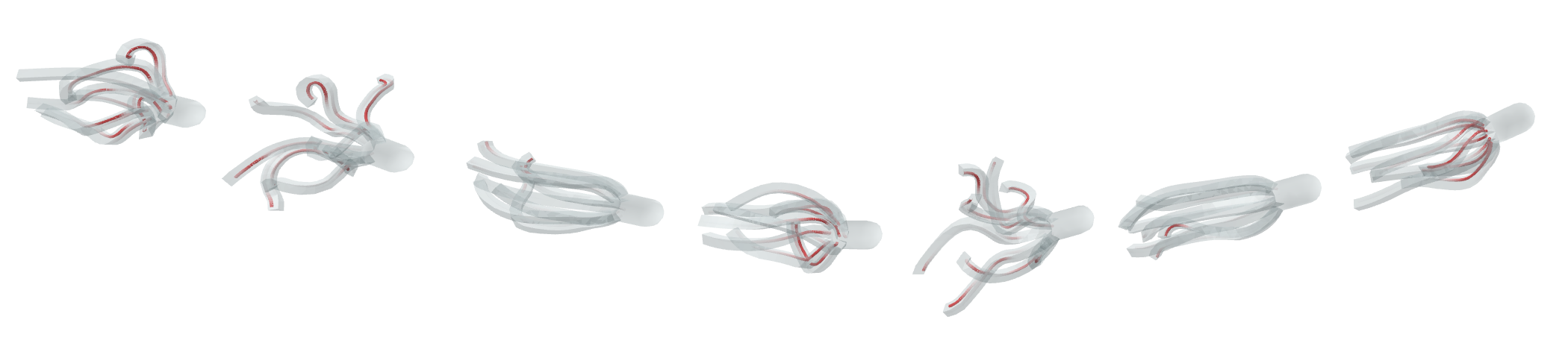
We present a novel and general framework for the design and control of underwater soft-bodied animals. The whole body of an animal consisting of soft tissues is modeled by tetrahedral and triangular FEM meshes. The contraction of muscles embedded in the soft tissues actuates the body and limbs to move. We present a novel muscle excitation model that mimics the anatomy of muscular hydrostats and their muscle excitation patterns. Our deep reinforcement learning algorithm equipped with the muscle excitation model successfully learned the control policy of soft-bodied animals, which can be physically simulated in real-time, controlled interactively, and resilient to external perturbations. We demonstrate the effectiveness of our approach with various simulated animals including octopuses, lampreys, starfishes, stingrays and cuttlefishes. They learn diverse behaviors such as swimming, grasping, and escaping from a bottle. We also implemented a simple user interface system that allows the user to easily create their creatures.